Daftar isi
Pengertian Rotasi Matematika
Rotasi dalam matematika mengacu pada perubahan posisi atau orientasi suatu objek dalam ruang melalui perputaran terhadap titik tertentu. Rotasi sering digunakan untuk menggambarkan perubahan sudut atau orientasi geometris dari objek dalam sistem koordinat.
Dalam rotasi, objek dianggap tetap berbentuk dan ukurannya tidak berubah, hanya posisinya yang berubah. Pusat rotasi adalah titik tetap di sekitar mana objek berputar. Sudut rotasi digunakan untuk mengukur sejauh mana objek berputar dalam derajat atau radian.
Rotasi dalam matematika dapat dijelaskan dengan menggunakan konsep matriks rotasi, trigonometri, atau koordinat kartesian. Dalam koordinat kartesian, rotasi sering diwakili oleh transformasi linear menggunakan matriks rotasi. Setiap sudut rotasi menghasilkan matriks rotasi yang spesifik untuk memutar objek dalam ruang.
Rotasi dalam matematika memiliki berbagai aplikasi, termasuk dalam geometri, grafika komputer, robotika, fisika, dan banyak lagi. Hal ini memungkinkan kita untuk memodelkan dan memahami pergerakan, orientasi, dan perubahan posisi objek dalam ruang tiga dimensi.
Jenis Rotasi Matematika
Dalam matematika, terdapat beberapa jenis rotasi yang umum digunakan. Berikut adalah beberapa jenis rotasi matematika yang penting:
1. Rotasi 2D
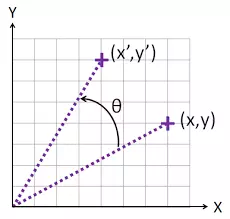
Rotasi 2D terjadi pada bidang datar atau dalam sistem koordinat dua dimensi. Rotasi ini mengubah posisi atau orientasi objek sejauh sudut tertentu di sekitar titik pusat rotasi. Sudut rotasi dalam rotasi 2D diukur dalam derajat atau radian.
2. Rotasi 3D
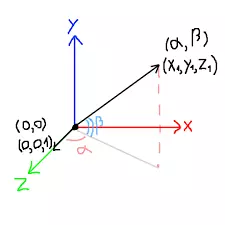
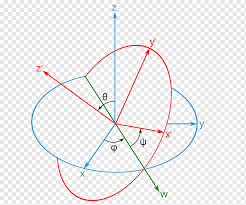
Rotasi 3D terjadi dalam ruang tiga dimensi atau dalam sistem koordinat tiga dimensi. Rotasi ini mengubah posisi atau orientasi objek sejauh sudut tertentu di sekitar sumbu rotasi. Sudut rotasi dalam rotasi 3D diukur dalam derajat atau radian. Rotasi 3D dapat dilakukan sepanjang sumbu x, y, atau z, serta kombinasi dari ketiganya.
3. Rotasi Putar Balik (Reflection)
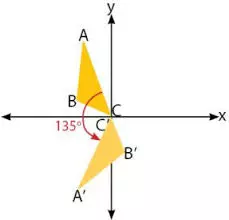
Rotasi putar balik adalah jenis rotasi yang menghasilkan pemetaan objek menjadi bayangan cerminannya di sepanjang bidang tertentu. Dalam rotasi putar balik, objek diubah posisi atau orientasinya terkait dengan bidang refleksi. Bidang refleksi dapat berupa bidang datar atau bidang datar yang melalui titik tertentu.
4. Rotasi Euclides
Rotasi Euclides adalah rotasi dalam ruang Euclides yang mempertahankan jarak antara titik-titik. Rotasi Euclides digunakan dalam geometri Euclides untuk memutar objek dalam ruang tiga dimensi tanpa mengubah bentuk atau ukurannya.
5. Rotasi Quaternions
Rotasi quaternions adalah representasi matematika rotasi menggunakan bilangan kompleks kuaternion. Quaternions menyediakan cara yang efisien untuk merepresentasikan rotasi dalam ruang tiga dimensi. Rotasi quaternions sering digunakan dalam grafika komputer dan simulasi fisika.
Faktor yang Mempengaruhi Rotasi Matematika
Ada beberapa faktor yang dapat mempengaruhi rotasi matematika. Berikut terdapat beberapa faktor yang signifikan dalam mempengaruhi rotasi, diantaranya:
- Sudut rotasi adalah faktor utama yang mempengaruhi rotasi matematika. Besar sudut rotasi akan menentukan sejauh mana objek atau sistem berputar. Sudut rotasi diukur dalam derajat atau radian.
- Sumurotasi adalah sumbu atau sumbu rotasi sekitar mana objek berputar. Pemilihan sumbu rotasi akan mempengaruhi arah dan orientasi perputaran objek. Sumbu rotasi dapat berupa sumbu x, y, atau z dalam koordinat tiga dimensi.
- Pusat rotasi adalah titik tetap di sekitar mana objek berputar. Pilihan pusat rotasi akan mempengaruhi posisi dan titik referensi rotasi objek.
- Koordinat awal objek sebelum rotasi juga mempengaruhi hasil rotasi. Rotasi dihitung relatif terhadap koordinat awal objek, sehingga perubahan koordinat awal akan mempengaruhi hasil rotasi.
- Ada faktor eksternal lain yang dapat mempengaruhi rotasi matematika, seperti gaya eksternal, momen inersia, torsi, atau batasan fisik yang mempengaruhi pergerakan objek. Faktor-faktor ini dapat mempengaruhi kecepatan, percepatan, atau stabilitas rotasi objek.
Rumus Rotasi Matematika
Terdapat tiga macam rumus rotasi matematika yang perlu diketahui berikut diantaranya:
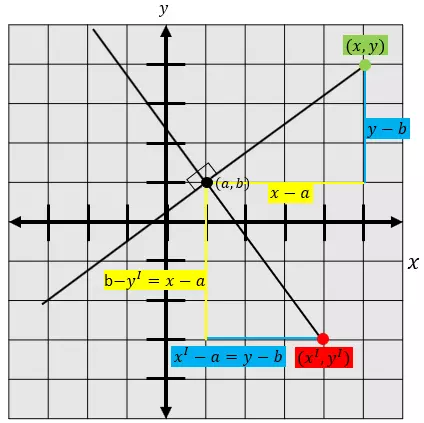
1. Rotasi 90 Terhadap Titik Pusat (A,B)
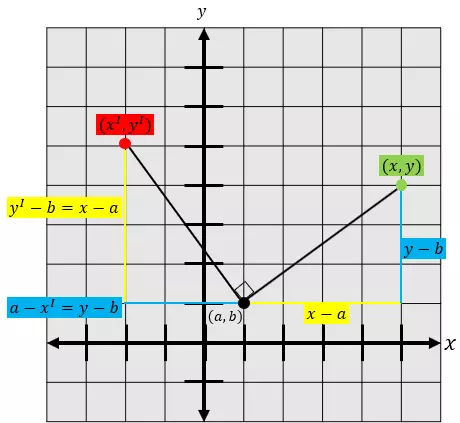
yˡ – b = x – a
yˡ = x – a + b
a – xˡ = y – b
xˡ = -y + a + b
(x, y) → (xˡ, yˡ) = (-y + a+ b, x – a + b)
(x, y) → (xˡ, yˡ) = (-y + (a + b), x – (a + b))
2. Rotasi 180 Terhadap Titik Pusat (A,B)
a – xˡ = x – a
xˡ = -x + a + a
xˡ = -x + 2a
b – yˡ = y – b
yˡ = -y + b + b
yˡ = -y + 2b
(x, y) → (xˡ, yˡ) = (-x + 2a, -y + 2b)
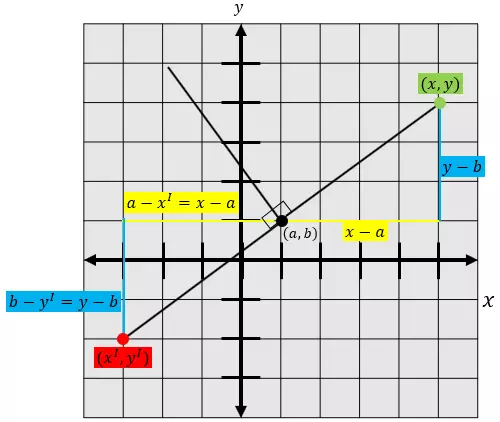
3. Rotasi 270 Terhadap Titik Pusat (A,B)
b – yˡ = x – a
yˡ = -x + a + b
xˡ – a = y – b
xˡ = y + a – b
(x, y) → (xˡ, yˡ) = (y + a – b, -x + a + b)
Contoh Soal Rotasi Matematika
Contoh Soal
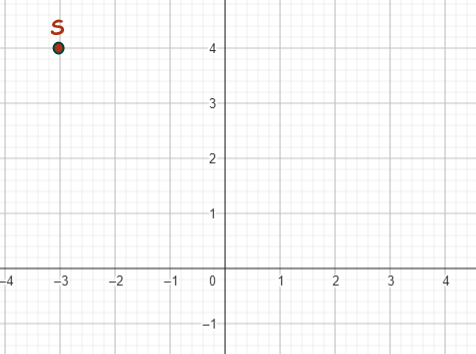
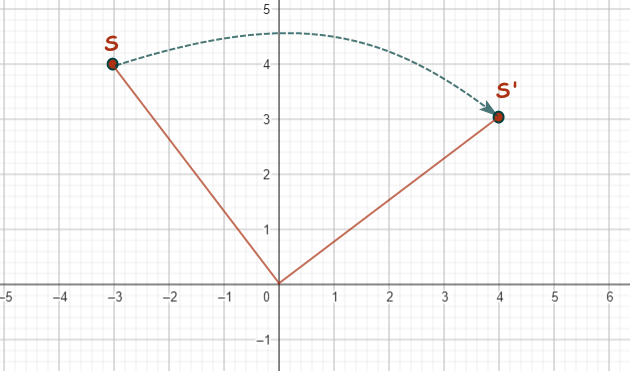
Perhatikan gambar di atas, apabila titik S dirotasi sejauh 90o dan searah dengan putaran jarum jam dengan titik pusat (0, 0). Tentukan koordinat akhir titik S!
Jawaban
Berdasarkan gambar tersebut, titik S terletak di koordinat (-3, 4). Oleh karena arah putarannya searah dengan putaran jarum jam, maka sudutnya bertanda negatif. Dengan demikian, koordinat akhir titik S dapat dinyatakan sebagai:
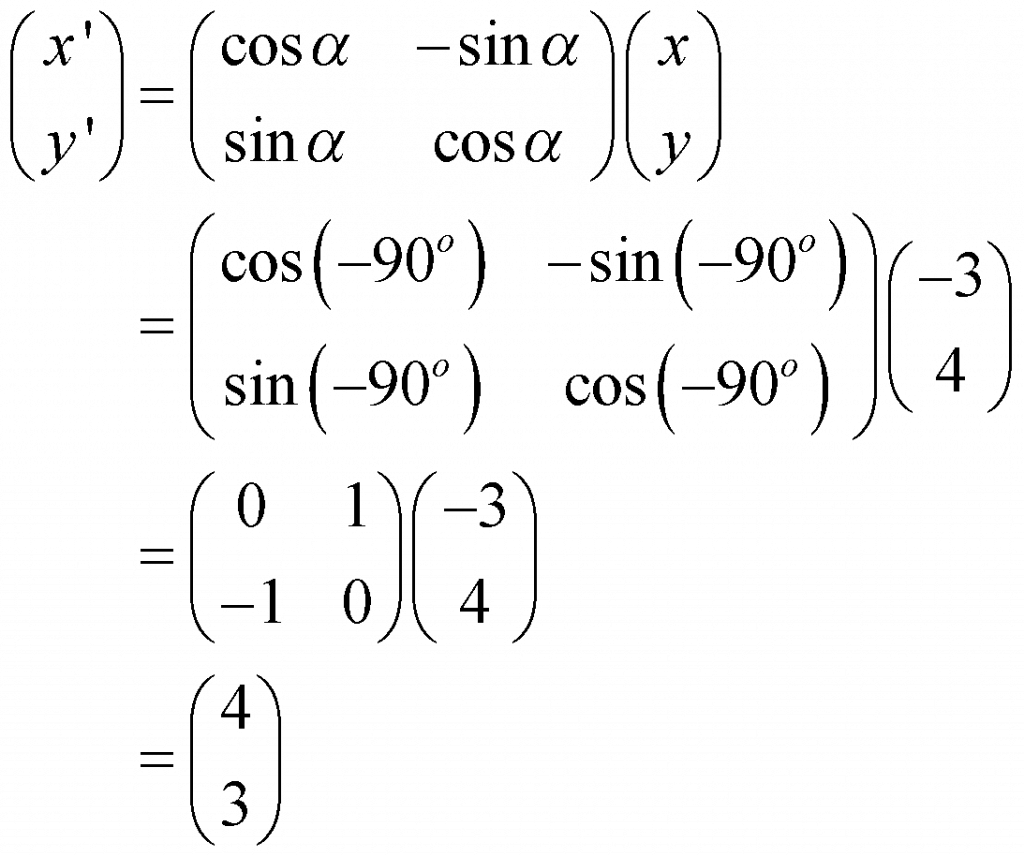
Dengan begitu, maka hasilnya ditemukan koordinat S’ (4,3)
Apabila digambarkan akan menjadi seperti berikut ini,